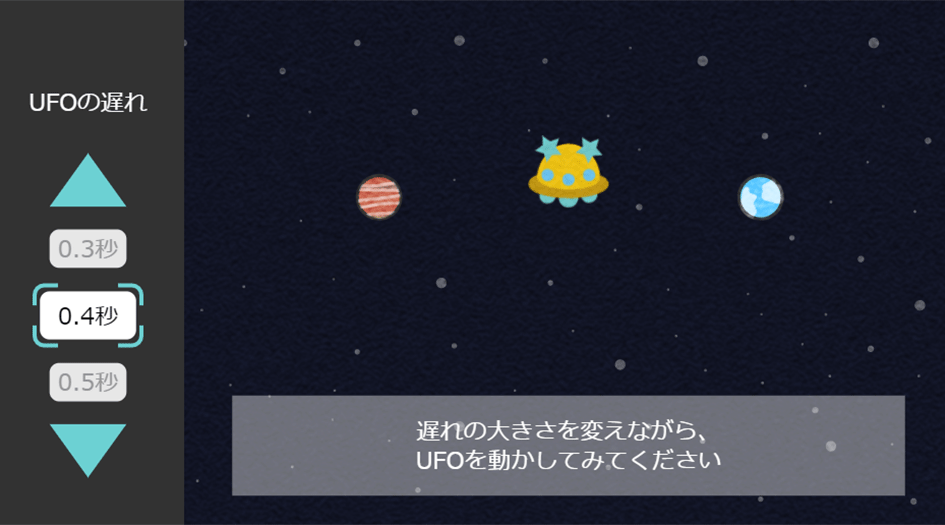
このデモではマウスやタッチパッド、トラックボールなどの使用をお勧めします。スマホやタブレットなどのタッチパネルでは錯覚が弱くなります。マウスを操作して、UFOを自由に動かしたり、惑星間を行き来させてみてください。画面左側の水色をした三角形のダイヤルで、マウスを動かしてからUFOが動くまでの時間を変化させることができます。時間遅れを大きくしていくと、どのように感じるでしょうか?
説明
コンピュータマウスを使って画面上のカーソルを動かすとき、マウスの動きに対してカーソルが遅れて反応する状況を経験したことはないでしょうか? そのようなとき、操作が難しくなるだけでなく、抵抗感や引っ張られるような力を感じた方もいるかもしれません。UFOのデモはその状況を体験できるようになっています。まずUFOの遅れがない状態で、UFOを操って2つの惑星の間を行ったり来たりさせてみてください。上手に惑星間を行き来できるようになったら、UFOの遅れを大きくして、また惑星間を行き来させてみてください。すると、先ほどは感じられなかった力や抵抗感が生じるのではないかと思います。
このような見た目の遅延による抵抗感は、そのときの動作や触れている対象によって硬さや重さと捉えられることもあります。例えば、ばねを押し込む動作をするときに、見た目のばねの変形に時間遅れを加えるとそのばねがより硬く知覚されることが報告されています。また、手で握ったハンドルを動かしている最中に、そのハンドルの見た目の位置を遅らせて提示すると、ハンドルの質量が増えたように知覚されることも報告されています。
見た目の遅れによって抵抗感が生じる原因としていくつかの仮説が提案されています。一つはカーソルの予測位置と実際の位置の間の食い違いそのものが抵抗感を生んでいるとする仮説です。つまり、我々はマウスを動かしたときにカーソルが「ここまで動いているであろう」と予測するのですが、見た目に遅れが存在する場合、実際のカーソルが予測した位置まで追いついていないという状況が発生します。このとき神経系は、カーソルもしくはマウスが何か意図しない外力に引っ張られたために予測との食い違いが生じたのではないかという解釈を選ぶことで、力を感じてしまうのかもしれません。しかし、この仮説では、予測との食い違いが大きくなるほど感じられる力も大きくなると考えられますが、この予想とは異なる研究結果も報告されています。その研究では、感じられる力の大きさは、予測との食い違いの程度よりも、カーソルの前方方向への運動加速度と比例していることを見出しています。
なぜ、このようなことが起きるのでしょうか? 遅れて動くカーソルは、粘性をもったバネを介してひっぱった物体と似た動きをする傾向があります。この物体を動かすときに手元にかかる反力はその物体の加速度に比例します(ニュートンの運動法則)。そこで、この研究では別の仮説として、神経系は、予測との食い違いがある程度大きくなるとその食い違いを説明するために、手とカーソルの間に(例えば粘性をもったバネがつながっているという)力学的なダイナミクスを想定するのではないか、そして、そのダイナミクスの想定のもとで手先にかかっているであろう反力を計算(逆動力学計算)して疑似的な力の感覚を生じているのではないか、と議論しています。
なお、見た目の遅れを十分に大きくすると、この力を感じる現象は生じなくなります。それは予測との食い違いが大きくなりすぎて、そもそもカーソルが自分とは無関係なものと解釈されるためかもしれません。
参考文献
- Smith, W. M. (1972). Feedback: Real-Time Delayed Vision of One’s Own Tracking Behavior. Science, 176(4037), 939–940.
- Di Luca, M., Knörlein, B., Ernst, M. O., & Harders, M. (2011). Effects of visual–haptic asynchronies and loading–unloading movements on compliance perception. Brain Research Bulletin, 85(5), 245–259.
- Honda, T., Hagura, N., Yoshioka, T., & Imamizu, H. (2013). Imposed visual feedback delay of an action changes mass perception based on the sensory prediction error. Frontiers in Psychology, 4, 760.
- Takamuku, S., & Gomi, H. (2015). What you feel is what you see: inverse dynamics estimation underlies the resistive sensation of a delayed cursor. Proceedings of the Royal Society B: Biological Sciences, 282(1811), p. 20150864.
デモについて
- デモの操作方法については、使用方法のページをごらんください。